Дисциплины - Операционные системы мобильных устройств
Что такое операционная система - Планирование
Планировщик – это часть менеджера процессов, которая ответственна за переключение между процессами и выбор очереди по какой-либо стратегии.
ОС поддерживает все блоки управления процессом (PCB) в очередях планирования процесса:
- Очередь задач (job queue) поддерживает все процессы в системе.
- Очередь ожидания (ready queue) хранит информацию обо всех процессах, находящихся в основной памяти в состоянии ожидания. В эту очередь попадают и новые процессы.
- Очереди из устройств (device queue) – это процессы, заблокированные из-за недоступности устройств ввода-вывода.
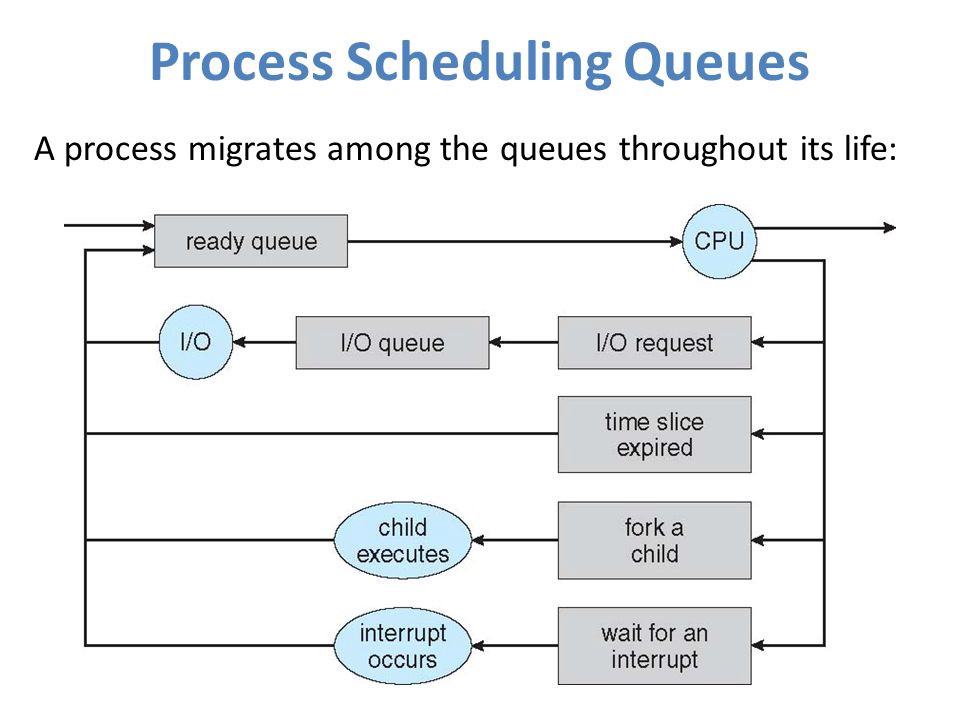
ОС может использовать разные методы реализации для управления очередями (FIFO, Round Robin, Priority). Планировщик ОС определяет, когда и как перемещать процессы между готовыми и запущенными очередями (могут иметь только одну запись на ядро процессора в системе). На приведенной выше диаграмме он был объединен с процессором.
Модели состояния делятся на активные и неактивные:
- Активные: при создании нового процесса он переходит в класс активных.
- Неактивные: процессы, которые не выполняются, а ждут завершения других процессов. Каждая запись в очереди является указателем на конкретный процесс. Очередь реализуется с использованием связанного списка. Использование диспетчера заключается в следующем: когда процесс прерывается, то переносится в очередь ожидания. Если процесс завершен или отменен – он отменяется вовсе.
Переключение контекста – это механизм сохранения (в PCB) и восстановления контекста процессора с ранее запущенного промежутка времени. При использовании этого метода, коммутатор контекста позволяет использовать один процессор для нескольких действий одновременно. Кстати, контекстное переключение является неотъемлемой частью многозадачной операционной системы.
Когда планировщик переключает процессор с одного процесса на другой, состояние из текущего запущенного процесса сохраняется в блоке управления. Затем состояние для следующего процесса загружается из своего PCB в регистры процессора. Только потом второй процесс может быть запущен.
При переключении следующая информация сохраняется для последующего использования: счетчик программы, информация планировщика, значение регистра базы и лимита, используемый в настоящее время регистр, измененное состояние, информация о состоянии ввода и вывода, учетная информация.