Диссертации - Проектирование системы безопасности объекта на основе геопозиционирования с возможностью удаленного контроля в режиме реального временинного контроля в режиме реального времени
ПРОЕКТИРОВАНИЕ СИСТЕМЫ БЕЗОПАСНОСТИ ПОДКОНТРОЛЬНОГО ОБЪЕКТА НА ОСНОВЕ ГЕОПОЗИЦИОНИРОВАНИЯ - Анализ глобальной навигационной спутниковой системы и построение структуры системы безопасности на основе позиционирования
Глобальные Навигационные Спутниковые Системы (ГНСС) представляют собой всепогодные системы космического базирования, позволяющие в глобальных масштабах определять текущие местоположения подвижных объектов и их скорость, а как же осуществлять точную координацию системного времени.
Спутниковую радионавигационную систему можно рассматривать как высокотехнологичную информационную систему, состоящую из пяти основных сегментов. Основные сегменты и связи между ними указаны на рисунке 1 [1].
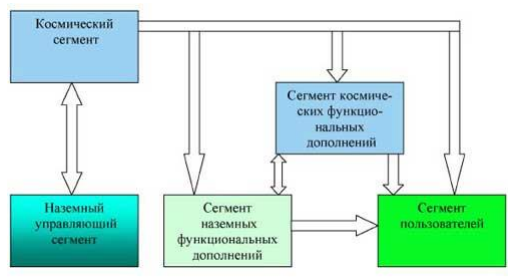
Рисунок 1.1 – Организация спутниковой радионавигационной системы
Наземный управляющий сегмент включает в себя центр управления космическим сегментом, станции слежения за навигационными спутниками (радиолокационные и оптические), аппаратуру контроля состояния навигационных спутников. Управляющий сегмент решает задачи определения, прогнозирования и уточнения параметров движения навигационных спутников, формирования и передачи в бортовую аппаратуру спутников цифровой информации, а также ряд контрольных и профилактических функций.
Космический сегмент представляет собой систему навигационных спутников, вращающихся по эллиптическим орбитам вокруг Земли. На каждой орбите находятся несколько навигационных космических аппаратов, имеющих на борту радиоэлектронную аппаратуру, излучающую в направлении Земли шумоподобные непрерывные радиосигналы, содержащие информацию необходимую для проведения навигационных определений с помощью аппаратуры потребителя.
Сегменты наземных и космических функциональных дополнений представляет собой аппаратурно-программные комплексы предназначенные для обеспечения точности навигационных определений, целостности, непрерывности, доступности и эксплуатационной готовности системы [2].
Сегмент пользователей потенциально может состоять из неограниченного количества спутниковых навигационных приемников, которые принимают сигналы навигационных спутников и производят расчеты текущего местоположения, скорости и времени с погрешностями, определяемыми спутниковой навигационной системой и аппаратурой потребителя.
Глобальная система позиционирования (GPS, ГЛОНАСС – обеспечивающие измерение времени и расстояния навигационных спутников) – спутниковая система навигации, позволяющая в любом месте Земли (не включая приполярные области), почти при любой погоде, а также в космическом пространстве вблизи планеты определить местоположение и скорость объектов.
Основной принцип использования системы – определение местоположения путем измерения расстояний до объекта от точек с известными координатами – спутников. Расстояние вычисляется по времени задержки распространения сигнала от посылки его спутником до приема антенной GPS-приемника. То есть, для определения трехмерных координат GPS-приемнику нужно знать расстояние до трех спутников и время GPS системы. Таким образом, для определения координат и высоты приемника, используются сигналы как минимум с четырех спутников.
Основой системы являются навигационные спутники, движущиеся вокруг Земли по 6 круговым орбитальным траекториям (по 4 спутника в каждой), высотой примерно 20180 км. Спутники излучают открытые для использования сигналы в диапазонах: 1575,42 МГц, 1227,60 МГц и 1176,45 МГц. Навигационная информация может быть принята антенной (обычно в условиях прямой видимости спутников) и обработана при помощи GPS-приемника.
24 спутника обеспечивают 100 % работоспособность системы в любой точке земного шара, но не всегда могут обеспечить уверенный прием и хороший расчет позиции. Поэтому, для увеличения точности позиционирования и резерва на случай сбоев, общее число спутников на орбите поддерживается в большем количестве.
Типичная точность современных GPS-приемников в горизонтальной плоскости составляет примерно 6–8 метров при хорошей видимости спутников и использовании алгоритмов коррекции. На территории США и Канады имеются станции WAAS (система распространения поправок к данным), передающие поправки для дифференциального режима, что позволяет снизить погрешность до 1–2 метров на территории этих стран. При использовании более сложных дифференциальных режимов, точность определения координат можно довести до 10 см. К сожалению, точность любой спутниковой навигационной системы сильно зависит от открытости пространства, от высоты используемых спутников над горизонтом.
Общим недостатком использования любой радионавигационной системы является то, что при определенных условиях сигнал может не доходить до приемника, или приходить со значительными искажениями или задержками. Например, практически невозможно определить свое точное местонахождение в глубине квартиры внутри железобетонного здания, в подвале или в тоннеле. Так как рабочая частота GPS лежит в дециметровом диапазоне радиоволн, уровень приема сигнала от спутников может серьезно ухудшиться под плотной листвой деревьев или из-за очень большой облачности. Нормальному приему сигналов GPS могут повредить помехи от многих наземных радиоисточников, а также от магнитных бурь.
Структура системы безопасности на основе позиционирования представлена на рисунке 1.2 [3].
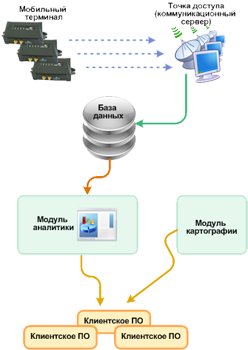
Рисунок 1.2 – Структура системы безопасности на основе позиционирования
Система безопасности, основанная на получение и обработки сигналов с различных спутниковых систем и передача актуальной информации в любой момент времени – это программно-аппаратный комплекс, использующий для определения координат контролируемого подвижного объекта, систему спутниковой навигации GPS и технологию GPRS в сетях сотовой связи (GSM) для передачи отчетов на сервер.
Система GPS мониторинга состоит из трех основных компонентов: аппаратная навигационная часть, серверная часть, клиентская часть. Спутниковая система GPS мониторинга обеспечивает такую важную составляющую процесса управления, как контроль и позволяет узнать точное местоположение объекта.
Мобильный GPS терминал является аппаратной навигационной частью и предназначен для определения координат и параметров работы контролируемого объекта (обычно транспортного средства), промежуточного хранения и передачи данных в точку доступа.
Точка доступа принимает данные от GPS терминала, преобразует их в форму, удобную для хранения в базе данных и складывает их в базу данных. В системе мониторинга транспорта может существовать несколько точек доступа – основная и резервная, а также специализированных на обработке того или иного типа мобильных терминалов.
База данных обеспечивает хранение и выдачу данных. В масштабных системах мониторинга может быть несколько баз данных, каждая из которых «специализирована» для хранения данных о группе терминалов или приближена в Web-пространстве к месту эксплуатации остальных элементов системы.
Модуль аналитики готовит аналитические отчеты за выбранный период времени по запросу клиентского ПО – рассчитывает величину параметров и счетчиков, считывает информацию с датчиков, установленных и подключенных к GPS терминалу
Модуль картографии хранит и выдает по запросу клиентского ПО изображение карт.
Клиентская часть представляет собой программу, работающую на обычном компьютере, имеющим любой доступ к Интернету. При работе получает информацию как в реальном времени, так и историю с серверной базы данных, в которой хранятся данные GPS слежения о контролируемых объектах. Такое построение системы GPS мониторинга позволяет диспетчеру подключаться к Интернету периодически, в отличии от серверного оборудования. Данные из базы данных отображаются на электронной карте местности, где находится объект. Система GPS мониторинга допускает любое количество подключений, разнесенных территориально и контролирующих одни и те же объекты. Например, за автопарком постоянно наблюдает диспетчер и при этом руководитель может в любой момент из любого места проконтролировать интересующий его автомобиль, за любой период имея ноутбук и возможность подключения к сети Internet.
В конкретных реализациях систем GPS мониторинга отдельные элементы представленной схемы могут быть совмещены друг с другом: часто совмещается клиентскую часть и модуль аналитики.
Подобная система безопасности применима как для контроля объектов различного назначения (товары, транспорт и т.д.), так и для контроля для определения местонахождения людей, животных.
Анализируя общую информацию о работе и построение системы безопасности на основе позиционирование можно прийти к выводу, что использование спутниковой радионавигационной системы в целях безопасности и навигации особенно эффективно. Главной задачей в данном случае является повышение достоверности навигационных определений. Эта проблема решается двумя путями:
-
обеспечение целостности спутниковой радионавигационной системы, отсутствие неисправной космической составляющей системы;
-
повышение помехоустойчивости приемников, в том числе в условиях воздействия преднамеренных помех. Этот путь включает: улучшение алгоритмов обработки сигналов, обеспечивающих снижение порогового отношения сигнал/шум, пространственно-временную обработку сигналов и комплексирование с другими системами.
В настоящее время способом для существенного повышения точности навигационных определений связаны с созданием глобальной системы отсчета, путем итерации двух спутниковых навигационных систем – ГЛОНАСС и GPS. Исходя из этого можно выделить четыре основных направлений модернизации спутниковой радионавигационной системы ГЛОНАСС:
-
улучшение совместимости с другими радиотехническими системами;
-
повышение точности радионавигационных определений и улучшение сервиса, предоставляемого пользователям;
-
повышение надежности и срока службы бортовой аппаратуры спутников и улучшение целостности системы;
-
развитие дифференциальной подсистемы [3].
Анализ глобальной навигационной спутниковой системы показал, что существуют много различных путей повышения эффективности работы системы и удобство ее эксплуатации.