Диссертации - Проектирование системы безопасности объекта на основе геопозиционирования с возможностью удаленного контроля в режиме реального временинного контроля в режиме реального времени
ПРОЕКТИРОВАНИЕ СИСТЕМЫ БЕЗОПАСНОСТИ ПОДКОНТРОЛЬНОГО ОБЪЕКТА НА ОСНОВЕ ГЕОПОЗИЦИОНИРОВАНИЯ - Методы и принципы определения координат и поиска сигналов в глобальной навигационной спутниковой системе
Орбитальная группировка системы GPS содержит 24 штатных навигационных космических аппаратов (спутников) на круговых синхронных орбитах с периодом обращения Т = 12 ч 00 мин (высота орбиты составляет около 20 000 км над поверхностью Земли) в шести орбитальных плоскостях (по четыре аппарата в каждой) с наклонением 55°, долготы восходящих узлов которых смещены с интервалом 60°.
Система GPS работает следующим образом. В каждый момент времени GPS-приемнику известно точное местонахождение навигационных космических аппаратов. Координаты могут быть вычислены для места на поверхности Земли по измерениям расстояний от группы космических аппаратов (если их положение в космосе известно). В этом случае навигационные космические аппараты являются пунктами с известными координатами. Если расстояние от одного навигационного космического аппарата известно, то можно описать сферу заданного радиуса вокруг него. Сфера заданного радиуса космического аппарата показана на рисунке 1.3 [3].
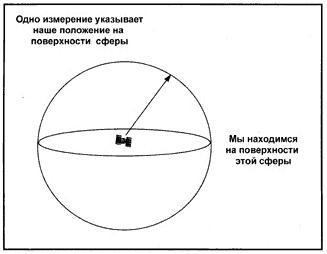
Рисунок 1.3 – Сфера заданного радиуса космического аппарата
В случае если известно расстояние и до второго навигационного космического аппарата, то определяемое местоположение будет расположено в круге, задаваемом пересечением двух сфер. Пересечение двух сфер показано на рисунке 1.4 [3].
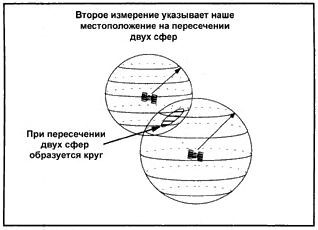
Рисунок 1.4 – Пересечение двух сфер
Третий навигационный космический аппарат определяет две точки на окружности, при этом остается выбрать правильную точку.
Одна из точек всегда может быть отброшена, т.к. имеет высокую скорость перемещения или находится на, или под поверхностью Земли. Таким образом, зная расстояние до трех навигационных космических аппаратов, можно вычислить координаты определяемой точки (GPS-приемники могут быстро вычислить истинную точку из двух).
Приняв сигнал не менее чем от трех навигационных космических аппаратов можно вычислить координаты любой точки около поверхности Земли. Но для точных вычислений координат необходимо использовать высокоточные часы. Это необходимо потому, что ошибка во времени всего в 0.001 с дает ошибку определения местоположения в 300 км. Именно поэтому на каждом из навигационных космических аппаратов GPS установлены атомные часы, причем не одни, а в четырех экземплярах, чтобы гарантировать, что, хотя бы одни из них будут работать в любом случае. Атомные часы на спутнике дают точность 10-9 с.
Расстояние до навигационного космического аппарата определяется по измерениям времени прохождения радиосигнала от аппарата до GPS-приемника умноженным на скорость света. Для того, чтобы определить время распространения сигнала необходимо знать, когда он покинул навигационный космический аппарат. Для этого на спутнике и в приемнике одновременно генерируется одинаковый псевдослучайный код.
GPS-приемник проверяет входящий сигнал с космического аппарата и определяет, когда он генерировал такой же код. Полученная разница, умноженная на скорость света (~3×105 км/с) дает искомое расстояние.
Использование кода позволяет GPS-приемнику определить временную задержку в любое время. Навигационные системы GPS излучают сигнал на одной и той же частоте, т.к. каждый навигационный космический аппарат идентифицируется по своему псевдослучайному коду (PRN или Pseudo Random Number code).
Вычисления напрямую зависят от точности хода часов. Код должен генерироваться на спутнике и GPS–приемнике в одно и то же время. На навигационном космическом аппарате установлены атомные часы, имеющие точность около одной наносекунды. Однако это слишком дорого, чтобы устанавливать такие часы в каждый GPS-приемник, поэтому измерения от четвертого космического аппарата используются для устранения ошибок хода часов приемника [5].
Альманах и эфимерис.
Все навигационные космические аппараты передают два вида данных – альманах и эфимерис. Альманах содержит параметры орбит всех спутников. Каждый спутник передает альманах для всех других навигационных космических аппаратов. Данные альманаха не отличаются большой точностью и действительны несколько месяцев.
В свою очередь, данные эфимериса содержат очень точные корректировки параметров орбит и часов для каждого спутника, что требуется для точного определения координат. Каждый GPS спутник передает только данные своего собственного эфимериса. Эти данные действительны только 30 минут. Спутники передают свой эфимерис каждые 30 секунд.
Если GPS был отключен более 30 минут, а потом включен, он начинает искать спутники, основываясь на известном ему альманахе. По нему GPS выбирает спутники для инициации поиска.
Если питание приемника отключить, а потом снова включить в течение 30 минут, он определит спутники очень быстро, т.к. не надо будет снова собирать данные эфимериса. Это называется «горячий» старт.
Если после отключения прошло более 30 минут, будет произведен «теплый» старт и GPS приемник снова начнет собирать данные эфимериса.
Если GPS приемник был перевезен (в выключенном состоянии) на несколько сотен километров или внутренние часы стали показывать неточное время, то данные имеющегося альманаха являются неверными. В таком случае приемнику требуется выполнить новый поиск (переинициализацию) для загрузки нового альманаха и эфимериса. Это уже будет «холодный» старт [4].
Виды сигналов навигационных космических аппаратов.
Схема формирования сигналов спутника системы GPS содержит два несущих колебания частотой 1575.42 МГц (L1) и 1227.6 МГц (L2), которые модулируются в фазовых модуляторах 3–4 (манипуляции фазы несущего колебания на 180°) псевдослучайными сигналами С/А– и Р-кода, предварительно просуммированными по модулю 2 элементами 1, 2 исключающее или с навигационным сигналом NAV, который передается со скоростью 50 бит/с. На рисунке 1.5 [5] показано, что несущая L2 модулируется только суммарным сигналом Р–кода, тогда как L1 – суммарными сигналами С/А– и Р–кода.
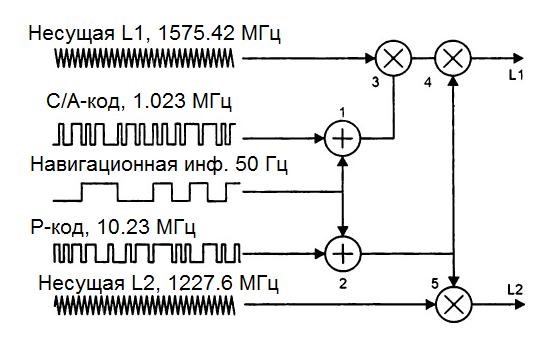
Рисунок 1.5 – Сфера заданного радиуса космического аппарата
В результате фазовой модуляции (манипуляции) ширина полосы сигнала, несущего информацию, увеличивается со 100 Гц (удвоенная частота навигационных посылок 50 Гц) до 20,46 МГц (для кода Р) и до 2,046 МГц (для кода С/А).
Р-код предназначен для высокоточных измерений (в режиме PPS – Precise Positioning Service) после заведения в 1994 году дополнительной криптозащиты (A/S – Anti-Spoofing) он обозначается как P(Y)). Поскольку этим кодом модулируются обе несущие, то сравнение времени прихода сигналов на частотах L1 и L2 позволяет вычислять дополнительную задержку, возникающую при прохождении сигналов через ионосферу, что значительно повышает точность измерений. Заметим, что некоторые приемники компании Trimble геодезического класса работают с Р-кодом.
Общедоступный код С/А (Coarse Acqusition — грубый захват) используется в режиме SPS (Standart Positioning Service — стандартная точность измерений).
Если в режиме PPS ошибка измерения горизонтальных координат не превышают 22 м, высоты — 27.7 м и времени — 0.09 мкс, то в SPS-режиме она увеличивается соответственно до 100 м, 140 м и 0.34 мкс [5].
Основные методы поиска сигналов глобальной навигационной спутниковой системы.
Принимаемые приемником сигналы глобальной навигационной спутниковой системы GPS можно охарактеризовать следующими параметрами: наложенная на сигнал псевдослучайная последовательность, индивидуальная для каждого НКА; доплеровское смещение частоты и время задержки – время от момента излучения сигнала до момента его приема.
Точное определение момента приема требует знания доплеровской отстройки по частоте и сдвига принимаемой псевдослучайной последовательности относительно генерируемой в навигационном пользовательском устройстве.
Таким образом, т.к. эти параметры являются неизвестными, при обнаружении требуется осуществить перебор по всем возможным значениям обоих параметров.
Время обнаружения стремятся сократить к минимуму, перебор по одному из параметров можно осуществлять параллельно.
При этом выделяют две основных схемы. Первая схема, приведенная на рисунке 1.6 [5], является последовательной по частоте и последовательно-параллельной по задержке или сдвигу кода.
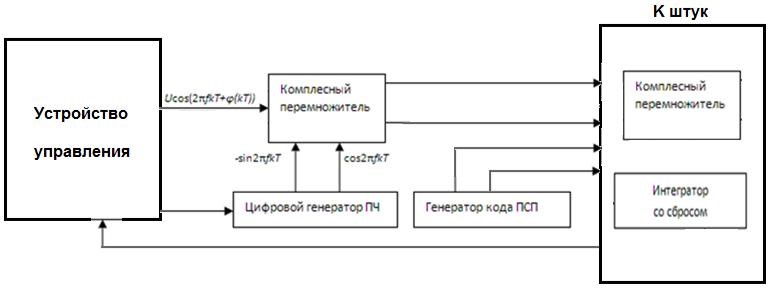
Рисунок 1.6 – Последовательная по частоте схема поиска сигналов спутников системы GPS
Устройство управления отвечает за управление остальными элементами схемы. Входной сигнал  представляет собой перенесенный на промежуточную частоту оцифрованный сигнал с входной антенны.
представляет собой перенесенный на промежуточную частоту оцифрованный сигнал с входной антенны.
Выражения, описывающие последовательную по частоте задержку или сдвиг кода представлены в выражении 1.1:
|
…
|
(1.1) |



где индекс ∆fm соответствует m-му шагу по доплеровскому смещению.
Добавка к фазе  отражает влияние эффекта Доплера [11]. Последовательно меняя частоту генератора с нужным шагом, обеспечиваем перебор требуемого диапазона доплеровского смещения. Параллельность при поиске смещения псевдослучайной последовательности достигается за счет использования К штук модулей, включающих комплексный умножитель и интегратор. Генератор кода псевдослучайной последовательности включает в себя линию задержки на
отражает влияние эффекта Доплера [11]. Последовательно меняя частоту генератора с нужным шагом, обеспечиваем перебор требуемого диапазона доплеровского смещения. Параллельность при поиске смещения псевдослучайной последовательности достигается за счет использования К штук модулей, включающих комплексный умножитель и интегратор. Генератор кода псевдослучайной последовательности включает в себя линию задержки на  элементов.
элементов.
Второй вариант заключается в использовании преобразования Фурье для параллельного поиска по частоте. На вход дискретного преобразования фурье (ДПФ) поступает результат комплексного умножения входной и опорной последовательностей. Размерность ДПФ будет соответствовать числу перебираемых доплеровских сдвигов, после ДПФ требуется такое же число сумматоров.
Параллельная по частоте схема поиска сигналов навигационных космических аппаратов приведена на рисунке 1.7 [5].
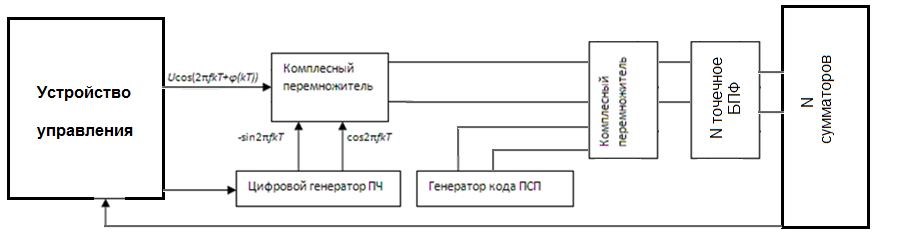
Рисунок 1.7 – Параллельная по частоте схема поиска сигналов спутников
системы GPS
Выражения, описывающие параллельную по частоте задержку или сдвиг кода представлены в выражении 1.2 [5]:
|
…
|
(1.2) |



где индекс k соответствует сдвигу псевдослучайной последовательности.
На выходе каждого сумматора получаем результат для соответствующего доплеровского сдвига и заданного на входе смещения псевдослучайной последовательности.
Существует ряд экзотических схем, сочетающих в себе преимущества, как первого, так и второго подхода, однако они эффективно работают только при определенных условиях, поэтому рассмотрены не будут.
Дифференциальный режим DGPS.
Учитывая точность, приемлемую для потребителя, и характеристики использующегося приемного устройства GPS, можно выделить несколько методов для получения координат при помощи GPS. Данными методами являются: автономная навигация, дифференциальные фазовые измерения, дифференциальное координирование.
При автономной навигации применяется только один (автономный) приемник. Данный метод используется туристами, штурманами для навигации судов, находящихся вдали от берега и военными. Точность определения координат около 100 м для гражданских потребителей и приблизительно 20 м для военных потребителей.
Дифференциальные фазовые измерения помогают достичь точности 0,5–20 мм. Этот метод получения координат применяется для геодезических измерений, управления строительной техникой и т.д. При использовании дифференциального координирования DGPS, погрешность спутниковых измерений составляет 0,5–5 м. DGPS – весьма простая для использования GPS приемником методика, при которой координаты места и/или точного времени могут быть получены мгновенно. Получаемая точность может быть выше 100 м (ранее – 30–50 м) для гражданских пользователей и 5–15 м для военных [4].
Дифференциальная навигация основана на относительном постоянстве значительной части погрешностей навигации во времени и в пространстве. При использовании дифференциального режима спутниковой системе необходимо два навигационных приемника (контрольно-корректирующая станция и потребитель), располагающихся в двух точках пространства. При этом дифференциальная контрольно-корректирующая станция (базовая станция) геодезически точно подвязана к принятой системе координат. Разности между измеренными и рассчитанными в ней значениями псевдодальностей спутников в области видимости, а также разности между измеренными и рассчитанными псевдоскоростями по линии передачи данных передаются потребителю. Эти разности называют дифференциальными поправками [5]. Потребитель же вычитает полученные поправки из измеренных псевдодальностей и псевдоскоростей. В случае, когда неточности определения псевдодальностей почти не меняются во времени и пространстве, погрешности значительно компенсируются поправками, переданными по линии передачи данных. Основными слабо меняющимися погрешностями определения псевдодальности являются ошибки синхронизации, погрешности за счет ошибок эфемеридного обеспечения, некомпенсированные ионосферные погрешности. С использованием дифференциальной DGPS неточности определения места снижаются до метров и ниже. Дифференциальный режим осуществляется с помощью контрольного- корректирующего навигационного приемного устройства, называемого базовой станцией. Базовую станцию устанавливают в точке с известными геодезическими координатами. При сравнении имеющихся координат (полученных в результате прецизионной геодезической съемки) с измеренными координатами базовым навигационным приемником формируются поправки, передающиеся потребителям по каналам связи. Приемник потребителя учитывает принятые от базовой станции поправки при решении навигационной задачи. Это дает возможность определить его координаты с точностью до одного метра. Результаты, полученные при помощи дифференциального метода, в большей степени зависят от расстояния между потребителем и базовой станцией. Использование данного метода наиболее результативно, когда преобладающими являются систематические ошибки, вызванные внешними (по отношению к приемнику) факторами. Данные ошибки в значительной мере компенсируются при близком расположении базовой станции к приемному устройству потребителя. Поэтому зона обслуживания базовой станции не превышает 500 км. Дифференциальные поправки могут передаваться от базовой станции к потребителю с помощью телефонной или радиосвязи, по системам спутниковой связи (например, INMARSAT), а также с применением технологии передачи цифровых данных RDS (Radio Data System) на рабочих частотах FM-радиостанций. На сегодняшний день в некоторых странах уже функционирует развитая сеть базовых (дифференциальных) станций, постоянно передающих поправки на определенную территорию [5].
Современные дифференциальные системы спутниковой навигации состоят из систем дифференциальной навигации по кодовым и псевдофазовым измерениям. Системы дифференциальной навигации по кодовым измерениям основаны на измерении и обработки псевдодальностей, в общем, обладают неограниченной областью действия и определяются неточностями определения места от долей до нескольких метров. Системы дифференциальной навигации по псевдофазовым измерениям характеризованы весьма высокой точностью позиционирования (до долей сантиметра). Но все же область их действия ограничивается дальностью 10-12 км в одночастотном режиме и 100 км в двухчастотном режиме. Специфической особенностью дифференциальных систем по псевдофазовым измерениям можно назвать неоднозначность данных измерений, которая затрудняет их использование. Системы дифференциальной навигации по псевдофазовым измерениям иногда называют системами относительных определений [6].
Системы дифференциальной навигации по кодовым измерениям могут быть локальными, широкодиапазонными и глобальными. Множество современных систем дифференциальной навигации являются локальными. Локальные дифференциальные системы применяют единственную наземную станцию измерений и формирования дифференциальных поправок (дифстанций). Дифстанция обычно размещается в центральной части локальной зоны, габариты которой составляют не более 200 км. В центре зоны достигается точность измерений приблизительно 0,5–1 м. На граничной части зоны точность снижается и постепенно приближается к точности абсолютных местоопределений. Дифференциальные поправки в локальных системах дифференциальной навигации могут быть сформированы на основании метода коррекции координат и метода коррекции навигационных параметров. Большее практическое распространение получил второй метод, в котором дифстанция создает поправки к измерениям псевдодальностей для каждого из видимых ею спутников. Пользователь поправляет свои измерения псевдодальностей по тем же спутникам на значения, полученные от дифстанции. Для передачи поправок, сформированных в соответствии с методом коррекции навигационного параметра, был разработан специальный стандарт RTCM SC– 104, который учитывает особенности современной системы позиционирования GPS [8].
В широкодиапазонных системах дифференциальной навигации (WADGPS) применяется сеть станций сбора информации (ССИ) и совершенно отличный от других метод получения дифференциальных поправок. Этот метод был назван the state-space approach (метод коррекции параметров моделей движения КА, свойств модели ионосферных задержек и смещений шкал времени навигационных спутников). В широкодиапазонных системах измерения двухчастотных навигационных приемников, размещенных на станциях сбора информации (ССИ), собираются в единый центр, где проходит их совместная обработка для оперативного уточнения параметров моделей движения космических аппаратов, смещения шкал времени спутников и формирования карт вертикальных ионосферных задержек. Все перечисленные данные далее оперативно передаются тем или иным способом потребителю, который применяет их для уточнения данных, извлекаемых им из сигналов навигационных спутников. Широкодиапазонные системы дифференциальной навигации помогают получить точность определения места со среднеквадратической ошибкой 0,5 м в области, охватываемой сетью ССИ, и соседних с ней областях. Между ошибками оценки смещений шкал времени и ошибками оценки вертикальных координат приемника осуществляют сильную корреляцию. Такая корреляция может возникнуть из-за абсолютной схожести соответствующих частных производных, особенно для спутников с большими углами возвышения. Стабилизация опорных частот приемников ССИ и приемника пользователя при помощи рубидиевых генераторов помогает лучше разделять ошибки оценки смещения шкал времени и вертикальных координат приемника. Результаты соответствующих экспериментов демонстрируют среднеквадратические ошибки вертикальных координат меньше 0,4 м [10].
Неосновным, но весьма значимым параметром широкодиапазонных системы дифференциальной навигации. Первая система WADGPS принадлежит фирме Satloc. Вторая система WAAS (Wide Area Augmentation System) находится в управлении правительства США. В системе WADGPS пользователю выдается карта вертикальных ионосферных задержек с шагом 2°. В системе WAAS, зависимо от класса точности, потребитель имеет возможность применять карты вертикальных ионосферных задержек разнличной точности. Наиболее подробные карты содержат до 929 точек прокола ионосферы [11].
Параметры системы WADGPS фирмы Satloc по сравнению с параметрами системы WAAS имеют некоторые различия. Задержка формирования корректирующих поправок в системе фирмы Satloc составляет 4 с, а системе WAAS – 6 с. Satloc использует только 15 ССИ. WAAS использует избыточное число из 24–х ССИ, расположенных как на континентальной территории США, так и на Аляске и Гавайских островах. Для того, чтобы удовлетворить строгим требованиям доступности, обеспечивающих высокую степень целостности, система WAAS требует два или более геостационарных спутника, излучающих дополнительные дальномерные коды. Скорость передачи корректирующей информации в системе фирмы Satloc равна 750 бит/с, а в системе WAAS приблизительно 250 бит/с. Корректирующая информация в системе фирмы Satloc квантуется с дискретом 1/16 м, а в системе WAAS – с дискретом 1/8 м [10].
Работа широкодиапазонных систем дифференциальной навигации базируется на применении трех основных категорий программного обеспечения. К первой категории относится программное обеспечение уточнения параметров орбит и смещения временных шкал спутников. Второй тип программного обеспечения - составление содержательных карт вертикальных ионосферных задержек. К третьему виду относится программное обеспечение, обеспечивающее постоянную работу наземной сети дифференциальной системы в режиме реального времени. Выделяют статический, кинематический и динамический методы уточнения параметров орбит и смещения временных шкал спутников. В статическом методе содержится решение так называемой вывернутой навигационной задачи. С помощью обработки измерений двухчастотных навигационных приемников, проводимых в одно и то же время из нескольких наземных точек с известными координатами, мгновенно определяется местонахождение и смещение временных шкал спутников, расположенных в области видимости наземных станций. В этом случае не берется в учет динамическая информация, заключающаяся в жесткой коррелированности пространственного положения спутников в смежные моменты времени. В кинематическом методе дополнительно оцениваются составляющие мгновенного вектора скорости также без учета динамической информации. В наиболее точном и совершенном динамическом методе проводится оценка определенного набора параметров орбиты, смещения временных шкал спутников и наземных станций, а также некоторых дополнительных параметров, порождающих модельные значения измерений наилучшим образом, согласующиеся с результатами реальных измерений на длительных интервалах времени. Значимым преимуществом динамического метода можно назвать его способность эффективно делить оценки эфемерид и смещения временных шкал, что повышает целостность системы. В случае, когда информация о движении спутника останется незамеченной, проводить раздельную оценку эфемерид и смещения временных шкал будет затруднительно, и точная оценка возможна только для суммы обоих компонентов.
В программном обеспечении уточнения параметров орбит и смещения шкал времени спутников в системе WAAS и дифференциальной системе фирмы Satloc используются алгоритмы из хорошо протестированного и обеспечивающего высокой точностью пакета прикладных программ GIPSY/OASIS II (GOA II). Данный пакет применяет динамический метод, обладает богатой историей развития и широко используется для высокоточного определения орбит различных космических аппаратов (в том числе, спутников GPS), а также в целях высокоточной спутниковой геодезии. Разработчиком и владельцем пакета GOA II является Лаборатория реактивного движения Калифорнийского технического института. Исходный пакет GOA II состоит по большей части из фортранных программ и UNIX–сценариев, что сильно затрудняет его использование в масштабе реального времени и среде, отличной от UNIX. Для преодоления этих ограничений JPL на основе пакета GOA II разработало новый пакет Real-Time Gipsy (RTG). Этот пакет предназначен для использования в системах широкодиапазонной дифференциальной навигации и прочих системах реального времени, например, в проектах NASA по определению орбит на борту космических аппаратов и определению координат радиолокатора с синтезированной апертурой на самолете в реальном масштабе времени. WAAS и дифференциальная система фирмы Satloc используют для уточнения параметров орбит и смещения шкал времени спутников пакет RTG, лицензированный JPL [11].
В пакете прикладных программ GIPSY/OASIS II (GOA II) оцениваются координаты и составляющие вектора скорости спутников на некоторый узловой момент, смещение шкал времени спутников и наземных пунктов, тропосферные искажения и коэффициент солнечного давления. Указанные параметры оцениваются по измерениям на 30-часовых интервалах [11].
В результате точность определения траектории возрастает более чем в три раза, по сравнению с точностью орбит, параметры которых передаются в навигационных сообщениях спутников. Среднеквадратические ошибки по радиусу, поперек и вдоль орбиты для указанного выше случая составляют соответственно 0,65, 1,37 и 1,96 м.
Обработка измерений осуществляется путем фильтрации относительно опорной траектории. Для фильтрации используется Square Root Information Filter (SRIF), обладающий повышенной численной устойчивостью, по сравнению с non-square root implementations. В предположении отсутствия проблем вычислительной устойчивости SRIF эквивалентен Калмановскому фильтру.
В основе метода, называемого nonlinear static estimation (NSE), лежит вычисление оценок параметров простой модели вертикальных ионосферных задержек Клобучара, обеспечивающих наилучшее согласование модельных данных с результатами измерений. Измерения извлекаются из двухчастотных измерений навигационных приемников, установленных на станциях сбора информации. Второй метод использует модифицированную версию пакета программ Global Ionosphere Map (GIM), разработанного JPL. Пакет программ GIM содержит программы на Фортране и UNIX–сценарии. Для увеличения мобильности и удобства работы в реальном масштабе времени JPL разработала на основе GIM новый пакет программ - Real Time Ionosphere (RTI), предлагаемый ею для лицензионного использования. В GIM и RTI ионосфера представляется как оболочка над Землей в системе координат, фиксированной относительно Солнца. Ионосфера в такой системе не зависит от вращения Земли и, следовательно, не зависит от местного времени. Оболочка дискретизуется на треугольные элементы. Значение интегральной электронной концентрации (ТЕС) в вершине каждого треугольника трактуется как случайный параметр и оценивается с помощью Калмановского фильтра. Начальные ограничения задаются моделью Бента. Широкодиапазонная система дифференциальной навигации фирмы Satloc для вычисления карт вертикальных ионосферных задержек использует пакет RTI, лицензированный JPL. По своей структуре глобальные системы дифференциальной навигации очень схожи с широкодиапазонными системами. Они тоже применяют наземную сеть станций сбора информации и тот же метод создания дифференциальных поправок. Главное различие состоит в том, что исключение ионосферных ошибок в глобальных системах дифференциальной навигации происходит при использовании двухчастотных измерений. Перспективы введения гражданских кодов в диапазоне L2 в GPS сделают двухчастотные измерения общедоступными. Исключение необходимости вычислять подробные карты вертикальных ионосферных задержек позволяет сильно снизить плотность станций наземной сети. Для этих целей достаточно иметь 12 хорошо расположенных по всему миру станций сбора информации. Для реальных экспериментов использовалось 18 из порядка 60 станций всемирной глобальной сети GPS (Global GPS Network, GGN) принадлежащей NASA, которые оборудованы двухчастотными навигационными приемниками. Необходимо ввести избыточных станций и довести их количества до 25–30. Введение избыточных станций позволяет увеличить точность и надежность дифференциальной системы. В настоящее время можно указать на существование пока что единственной в мире глобальной системы дифференциальной навигации, использующей в качестве основы станции глобальной GPS сети (GGN) NASA. Для оперативного уточнения орбит навигационных спутников в этой системе используется тот же пакет прикладных программ RTG (Real Time Gipsy), который используется для уточнения орбит в широкодиапазонных дифференциальных системах фирмы Satloc и WAAS [12].